社会の「困りごと」に挑む
- 仕事
- 働き方
産学共同で「点検ロボット」を製品化
老朽化した社会インフラと向き合う
PSI事業、IEC事業と並んで、サンリツオートメイションの事業3本柱を構成するのがAMC事業(先進計測制御=Advanced Measurement and Control Systems)。医療機器やロボット、高精度制御装置で求められるような、高速で精度の高いセンシング&アクチュエーション技術を融合し、信頼性・安全性に優れた製品を創り出していくビジネスだ。顧客の依頼でシステムを構築するPSI事業、部品としてボードコンピュータなどを供給するIEC事業とは、サンリツ自身が最終製品を市場に供給するという点で大きく異なっている。だが、技術力で社会や企業の「課題」「困りごと」を解決するという姿勢は変わらない。
活動フィールドは「人が入れない場所」
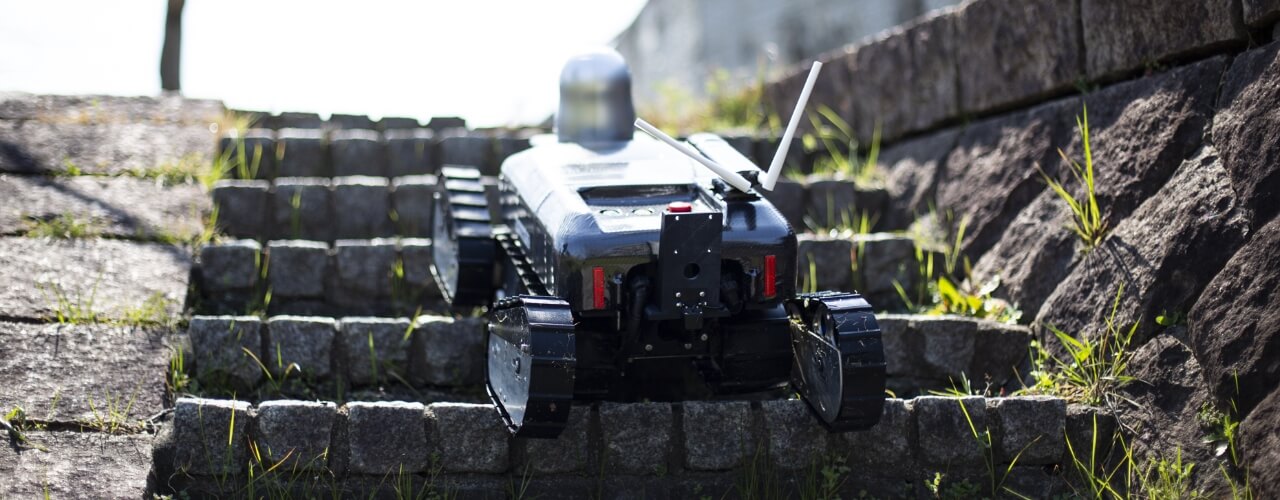
どことなく月面探査車を思わせるデザインの点検ロボットは、独特の電動モーター音を響かせながら、一面に石がころがる池の浅瀬を進んでいく。対岸で方向転換すると、石組みの護岸を駆け上がり、今度は人が出入りする階段へ。挨拶でもするかのように、ひょいと前足を持ち上げて、ゆっくりと階段を上っていく。無線でコントロールする操縦者の手には、見慣れたゲームコントローラーが握られている──









遠目には、いい年齢の大人がラジコン遊びをしているようにしか見えないが、サンリツが開発した「点検ロボット」のテスト風景だ。
この日のテーマは、ゴム製クローラ(キャタピラ)のアライメント(車軸に対する取付角度)調整。直進性を上げるように調整すると旋回性が犠牲に、旋回性をよくするとクローラベルトがズレやすくなるなど、落としどころがなかなか難しい。最適解はさまざまな現場でのテストを重ねながら探っていくしかない。
この日、テストを行っていたのは、ソリューション部主任技師の三浦貴彦と、開発一部スペシャリストの三浦洋靖。2人とも、サンリツの名古屋技術センターで仕事をしている。三浦貴彦が全体の仕様を作成し、三浦洋靖が具体的なメカと制御系設計を担当し、作り込んでいくという役回りだ。
三浦貴彦が点検ロボットの特徴を説明する。
「ボディの前後に“サブクローラ”が付いています。サブクローラがないとクローラを駆動する車輪の半径の高さしか乗り越えられませんが、これがあることで、階段のような段差でも自由に上り下りができます。
サブクローラそのものは、以前から使われています。しかし、今までのものは上げ下げを個別に操作する必要がありました。ウチのサブクローラは、愛知工業大学・奥川雅之教授の研究室で開発した“受動適応サブクローラ”です。受動適応サブクローラの制御には、モーターを用いていませんが、サブクローラに生じる重力やロボットの機構特性を積極的に利用した設計を取り入れたことにより、ロボットが段差に応じて、サブクローラを上げ下げして乗り越えていきます。段差に対してロボットがよじ登ろうとするのではなく、身を任せて無理なくしなやかに踏破するイメージです」
遠目にはラジコン模型のようでも、実物はかなりの大きさ。重量約25kgと迫力があるが、「1人で運べる」というコンセプトなので、これから、さらなる軽量化を図っていく。無線でコントロールできる距離は250m。有線でも操縦できる。記録用のフルハイビジョンカメラを備え、各種センサーの搭載に対応する。条件にもよるが、連続で3時間稼働し、7~8kmの走行が可能だ。
老朽化して点検が必要だけど、人が入ることができないサイズの配管内部を点検する──それが、このロボットの役割だ。
まず想定しているのは、道路の路面下を走る、直径 60~150cm 程度の排水管での運用。日本中の道路には、合計すると気の遠くなるような距離の排水管が埋設されている。
実は、点検ロボットは、サンリツが単独で企画した製品ではない。大学の研究室が行っていた研究成果を、事業化できるようにサンリツが製品開発し、産学共同で社会実装に挑むという、まさに実験的なプロジェクトである。

“遠隔操縦システム”の用途を探せ
先進計測制御(AMC)事業担当取締役で、このプロジェクトを統括する高倉広義が、開発に至った経緯を語る。
「インターネットを使った遠隔操縦のコンピュータプラットフォームをやりたくて、2003年頃から研究をスタートしました。2005年の愛知万博ではロボットが数多く出品されましたが、参加した企業からの依頼で、二足歩行ロボットに搭載するコンピュータを開発。また自社開発にて遠隔操縦でロボットの動きをコントロールする通信システムを開発したんです。
せっかく開発した遠隔操縦システムなので、その用途を広げたい。ニーズがどこにあるのか、若手社員に調査をしてもらったんですね。そこで出会ったのが、『レスキューロボットコンテスト』でした」
レスキューロボットコンテスト(以下、レスコン)は、1995年の阪神・淡路大震災の経験を役立てたいと、関西のロボット研究者たちが中心になって2000年に立ち上げたもの。大震災で倒壊した街を6分の1スケールで作り、参加チームのレスキューロボットが、被災者ダミー3体の救出を競い合うというユニークなコンテストだ。
当初、レスキュー用のロボットは、カメラ画像のアナログ伝送とラジコンのプロポ操縦という組合せで作られていたが、レスキュー課題の難度が上がり、ロボットも複雑化していく2005~2006年頃になると、思うようにロボットが動かない場面が頻発。それまでの操縦システムでは立ち行かなくなってきていた。
そこへ、自社開発した遠隔操縦システムを抱えて、市場調査に現れたのが、サンリツの三浦貴彦だった。
「会場を覗いてみると、トラブル続きで本当に困っている様子でした。訪れた趣旨を伝えると、すぐに奥の関係者エリアに連れていかれ、実行委員の先生方から質問責めにあいました。偶然にも、最初に会場で声をお掛けした実行委員が、現在のレスキューロボットコンテスト実行委員長である奥川先生だったんです」
これが縁となり、2007年の大会からは、サンリツの製品である遠隔操縦システムv1(TPIP1)モジュールを参加チームに提供。新しい遠隔操縦システムを搭載したロボットで、競技が行われるようになった。
ちなみにTPIP1は、独自の技術で通信・画像の伝送遅延を補正し、距離を感じさせないリアルタイムの遠隔操縦を可能にするモジュール。インターネット回線を使い、遠隔制御、画像監視の両方が1台で同時に行える。現在は、TPIP3(遠隔操縦システムv3)に進化し、点検ロボットにも搭載されている。
レスコンとの出会いは、その後、奥川研究室とロボットを共同開発していく最初のきっかけとなった。



